MISE A JOUR LE 8 Aout 2008

En lisant un article dans RCM sur les AUVS des copains modélistes et moi même avons fait tilt, mais..... pas avec les mêmes moyens !!!!! Si vous êtes intéressés par les AUVS allez voir le site : http://avdil.gtri.gatech.edu/AUVS/IARCLaunchPoint.html
Au départ, le projet, qui traînait dans nos têtes au club de modèle réduit en 1998, était de faire un aéronef complètement autonome, pouvant décoller, aller sur un point bien précis, filmer si possible avec retransmission des images au sol et atterrir. Cependant, nous nous réservions une possibilité de pilotage "normal" .... au cas où !
Depuis 1998, bien des choses ont changées, je me suis retrouvé seul à faire ce projet, la technique a bien évoluée, j'ai mieux cerné le "problème" et comme je suis de nature percéverante ce projet est toujours d'actualité. Ci-dessous vous trouverez un historique des choses réalisées au fur et à mesure de mes éssais et du temp. C'est pour cette raison que certaines choses sont obsolètes ou ont été abandonnées. Cette page est donc présentée comme un carnet de bord ( en 1998 le mot "blog" existait pas, ou était pas connu......).
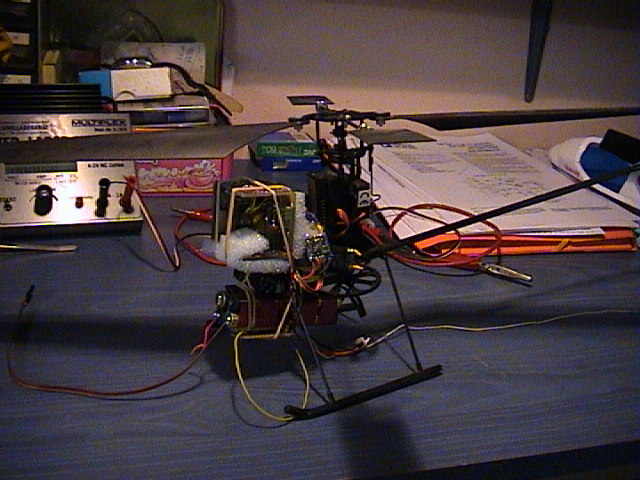
Après réflexion, j'ai pensé qu' un hélicoptère serait le
plus adapté mais ça va compliquer encore plus la réalisation. Il ne tient pas
en l'air tout seul cet engin là ! Le projet étant un peu ambitieux et les
moyens financiers de plus en plus restreints (ce qui va également considérablemen ralentir......) il sera réalisé sur
plusieurs années ! De plus un hélicoptère permettra de faire des vols d'éssais dans le jardin, enfin si les voisins acceptent !!!
Mais il faut agir par étapes.
- Un système de génération de signaux pour les servos (8 maximums)
- Un pilote automatique pour la stabilisation de l'aéronef, traitements des données, interface GPS, waypoint à faire....
- Une centrale à inertie (3 gyroscopes, 3 accéléromètres)
- Un compte-tours moteur qui nous indiquera si celui-ci a calé
- Un système d'analyse de positions des servos envoyé par l'émetteur, pour nous afranchir d'un problème dans le système et permettre un basculement en pilotage manuel.
- Une boussole digitale lorsque l'aéronef a une vitesse nulle, car le GPS ne marche pas pour le cap à vitesse nulle.
- Distance Mètre entre 0 et 10 mètres pour l'atterrissage ou le décollage résolution à 1% de la mesure.
- Altimètre pour l'altitude une altitude précise au-dessus de 10 mètres, le GPS étant pas vraiment précis.
- Un thermomètre pour compenser la centrale à inertie ( dérive des composants)
- Systèmes GPS pour la vitesse, la position et le compas, afin de re-calibrer en permanence la boussole digitale et la centrale à inertie lorsque l'aéronef a une vitesse non nulle.
Le processeur choisi pour le prototype qui devait gérer tous ces capteurs, était un 80537 avec 64Koct de RAM sauvegardé et 64Koct de EPROM pour le soft. Une liaison série servait à la discussion avec un PC au sol. Un LCD permetait d'afficher des indications avant le décollage ainsi que deux LED, une pour connaître l'état du GPS et l'autre pour savoir si le système reçevait les ordres de l'émetteur ( autonome ou piloté par l'émetteur). Cette carte était entièrement en wrapping ( fiabilité mauvaise oblige et technologie obsolete !). Il a donc été décidé d'acheter une carte miniature toute faite ( Gumstix).
Cliquez pour savoir où en est la progression de l'électronique
- 1er essai en vol le 13 juin 1998
- 2ème essai au sol en voiture le 20 juin 1998
{kind=link}
- 3ème "essai" le 15 octobre 1998
Le fuselage pèse déjà 3.1 Kg avec un OS61FX et c'est sans compter sur l'électronique qui pèse 600 grammes. Sur l'avion il restait à faire l'empennage, j'ai récupéré le fuselage et les ailes au club. En parallèle du montage de l'avion, il a été effectué un blindage du module électronique embarqué.
Un problème apparaît : lorsque l'avion est incliné le capteur de nord magnétique donne de fausses indications ( je m'y attendais). Avec un avion, contrairement à un hélicoptère, ce problème n'est pas critique car il n'est jamais stationnaire, c'est donc le GPS qui donne le cap suivi ( sauf si le vent de face est égal ou supérieur à la vitesse de l'avion....).
- 4ème "essai" le 7 Novembre 1998

- 5ème "essai" le 19 Décembre 1998
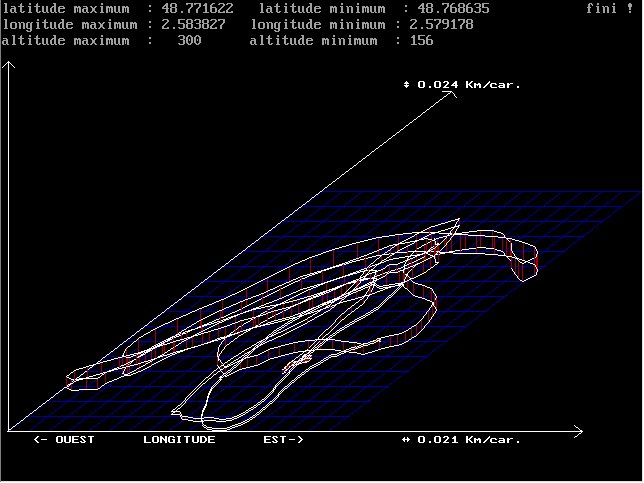
Nous nous bornons au décollage, deux passages de piste pour faire fonctionner le capteur de distance, deux prises d'altitude pour vérifier les données GPS et altimétriques du capteur de pression atmosphérique.
Première satisfaction, l'électronique ne perturbe plus le récepteur. En effet, la courbe du capteur de pression indique que l'avion est monté à plus de 450 m et ce, sans "top" radio. Les 200 premiers points du graphique GPS sont bien enregistrés (je n'ai pas mis les 600 points de la mesure car le graphisme devient illisible).
{kind=link}
{kind=link}
- 6ème "essai" le 27 Mars 1999
Le 1er vol de la journée embarque une bouteille de coca vide (pub). Après une montée tranquille l'avion arrive à une altitude suffisante (400 m) et est mis sur le point de largage. Nous ne voyons rien tombé !!!
Au retour la trappe est pourtant bien ouverte !!!
La courbe du parcours sur une carte et la courbe en trois dimensions . 2ème vol, identique dans sa mission. Cette fois je le fais monter moins haut pour que nous puissions apercevoir le largage... La trappe est programmée, par l'intermédiaire du GPS, pour s'ouvrir au dessus de la piste circulaire et libérer un chiffon comme pour le vol précédent.
{kind=link}
{kind=link}
Cette fois, nous voyons le largage et le chiffon se pose à moins de 2 mètres du centre de la piste, il faut dire que le vent m'a un peu aidé ! La courbe du parcours sur une carte et la courbe en trois dimensions .
{kind=link}
{kind=link}
Rappel : ce test a été fait avant que le DOD supprime l'imprécision du système GPS, donc mission réussie !Lorsque l'on regarde les données, il y a toujours un problème sur le capteur de distance ultrasonique probablement dû aux vibrations du moteur (pourtant bien isolé) où peut-être au bruit du moteur lui-même. Problème à voir.
- Reprise des essais courant Juin 2002 !!


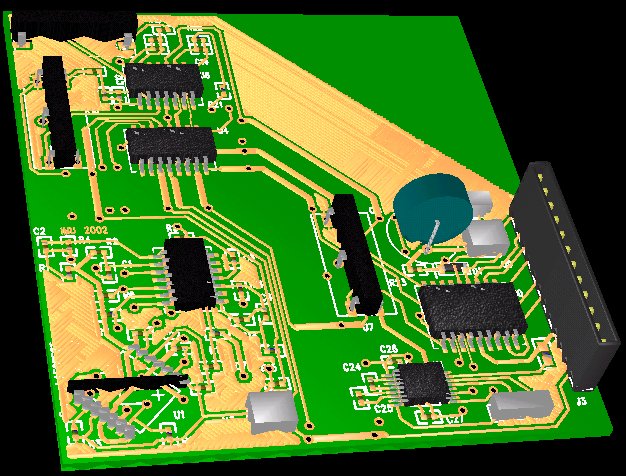
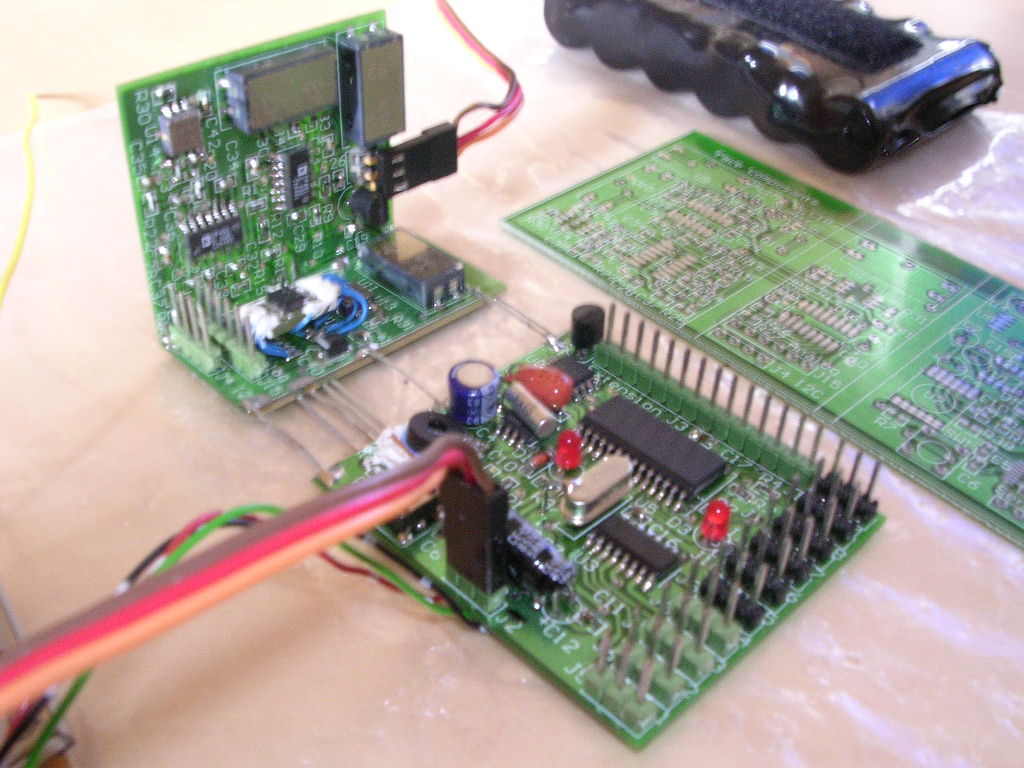
Cette carte sera découpée en 4 pour pouvoir former un cube ( la quatrième partie étant "perdue"), il me restera donc 3 faces pour faire d'éventuesl ajouts d'électronique. J'envisage d'y intégrer le capteur de pression sur une des faces libres et le compte-tours. La gestion est confiée à un PIC 16F84 classique tournant à 10 Mhz. J'utilise également un AD7888 pour faire la conversion analogique /digital sur 12 bits.
- AOUT / SEPTEMBRE 2002
A part une stupide erreur de conception (les entrées des amplis op étaient inversées) et qui a nécessité 6 straps, elle fonctionne. Le PIC gère le convertisseur A/D 12 bits pour les 6 entrées ( 3 gyros, 3 accéléromètres) et transmet ces valeurs sur une liaison RS-232C à 2400 bauds, pour l'instant.
Il me reste 2 canaux analogiques pour les extensions (en priorité le capteur de pression puis le compte tour et peut être une nouvelle carte GPS) sur les faces libres , ce qui va me permettre d'envoyer un maximum de données sur un seul bus RS-232 .
Les essais en statique semblent prometteurs ; seulement dès que je bouge un peu la centrale ça se complique. Lors du premier essai en voiture, il y a beaucoup de bruits sur les signaux, j'observe un autre phénomène : sur le tracé les accélérations en X, Y et Z se "valent", pourtant je n'ai pas fait de tonneaux !! juste gauche, gauche, droite, gauche, droite, gauche, gauche (les gyros en axe X et Z ne sont pas installés, trop chers).
{kind=link}
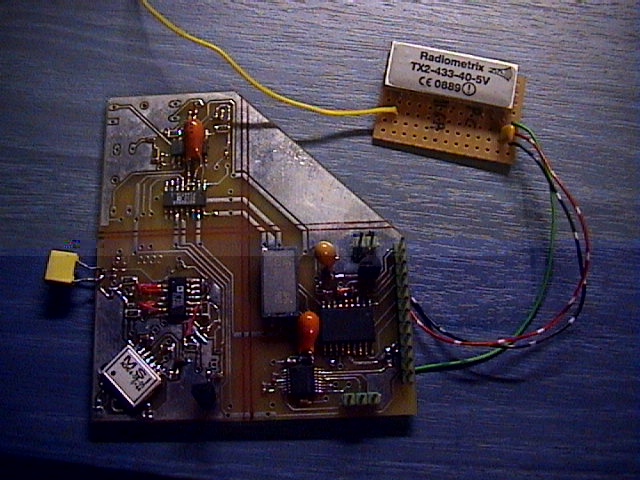
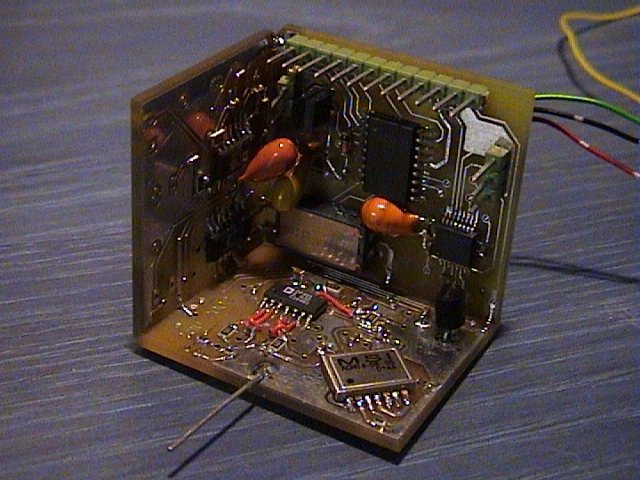
Pourquoi lorsque j'accélère (axe des X) mon accélération se répercute-t'elle en Y et en Z ?Je décide de procéder par étapes. Je fais des essais en marchant / courant. Je relie un émetteur 433 Mhz pour transmettre les données au PC sans avoir de fil à la patte....
La bonne nouvelle : l'émetteur / récepteur fonctionne parfaitement, je reçois les données transmises par la centrale sans problème. J'envisage d'utiliser ces modules pour retransmettre les données au sol lorsque la centrale sera sur l'hélicoptère.
Le "bruit" est moindre mais quand j'accélère en X j'ai toujours des accélérations en Y et Z . En fait après avoir relu les spécifications de ce capteur je me suis appercu qu'un axe pouvait être interféré de 20% par un autre !!Premier essai en vol pour la centrale sur un Hélicoptère miniature le "Piccolo":
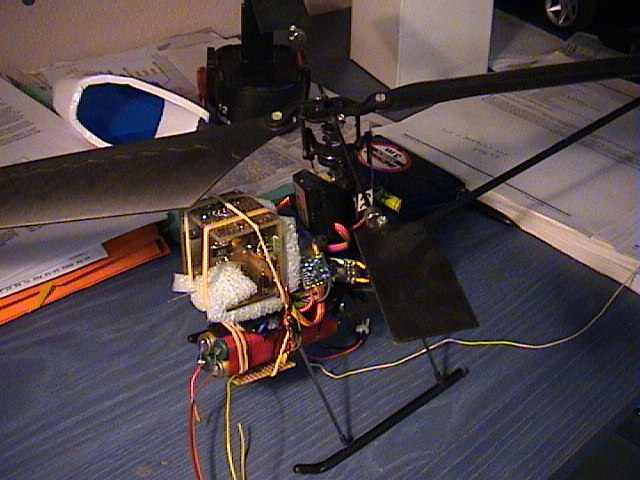
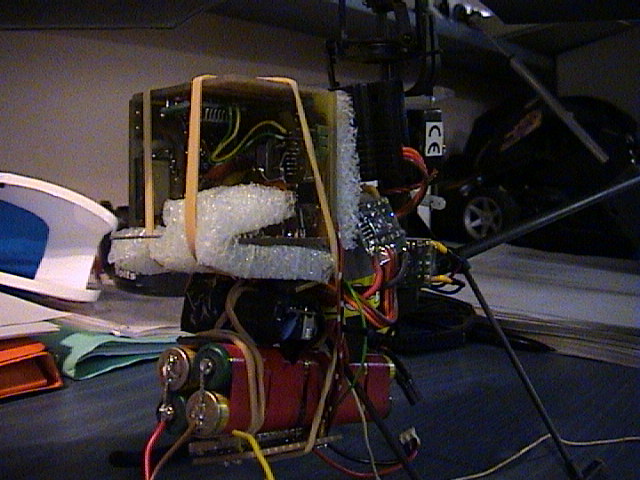
J'ai rajouté sur l'IMU un capteur ADXL202 pour comparer avec le ACH-04-08-05. L'ADXL est plus sensible que l'ACH mais en vol le "bruit sur les signaux" est plus fort aussi. Décidément les filtres de Kalman vont être nécessaires !!La liaison série est passée à 4800 BaudsAjout d'un capteur de pression le MS5534 également capteur de température. Le soft du PIC a été créé et il a l'air très sensible. A voir en vol....
{kind=link}
{kind=link}
- OCTOBRE 2002 / JUILLET 2003
Aujourd'hui les mesures faites sur la centrale à inertie m'ont permis de tirer des conclusions et j'ai donc décider de refaire une nouvelle centrale à inertie version 2. Le circuit imprimé est conçu il y a plus qu'à le faire fabriquer. Chose qui devrait être faite en Septembre, après les vacances. Cette centrale intègre les 3 accélérateurs, les 3 gyros ainsi qu'un capteur altimétrique, un compte tour rotor, la génération des signaux nécessaires pour les servos, une supervision d'alimentation et une entrée PPM pour la gestion des commandes reçues du sol par radio au cas où !! Le tout sera géré par un PIC 18F252 qui est plus puissant que le 16F84. La partie filtre de KALMAN sera sur une carte processeur séparée.
- JUILLET 2003 / MARS 2004
Après une longue période de "stand-by" sur ce projet ( encore !! ), ma motivation reprend. Le circuit imprimé de la version 2 de la centrale à inertie est enfin prêt ainsi que l'approvisionnement des composants. La fabrication du circuit devrait être faite rapidement.
AVRIL 2004 / Juillet 2004
- AOUT 2004 / OCTOBRE 2004
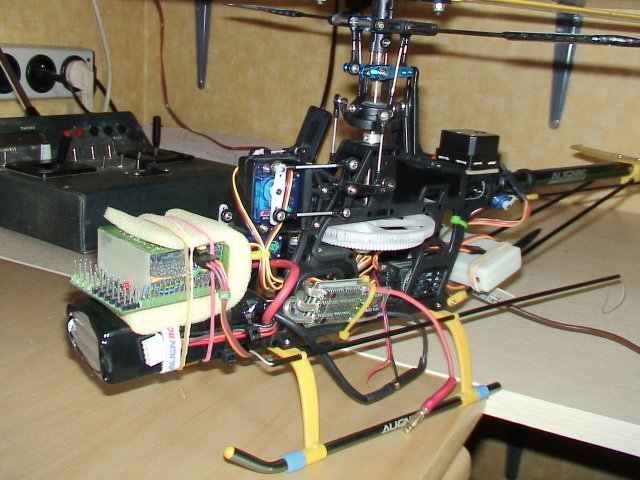
Reprise du compas 2D réalisé il y a fort longtemp pour le modifier en compas 3D avec des capteurs HMC 1022 et HMC 1021. Les trois sorties analogiques sont envoyées sur le convertisseur analogique / digital de la centrale ( 12 bits). Le compas a été "inséré" ( de force ) au milieu de la centrale à inertie ce qui me fait gagner de la place dans l'hélicoptère. Le concept 30 a été remis à jour : ajout du capteur compte tour et installation d'un récepteur RX23 de Mr Francis THOBOIS. ceci me permettant de commencer les tests en grandeur nature en toute sécurité.
- NOVEMBRE 2004 / Fevrier 2005
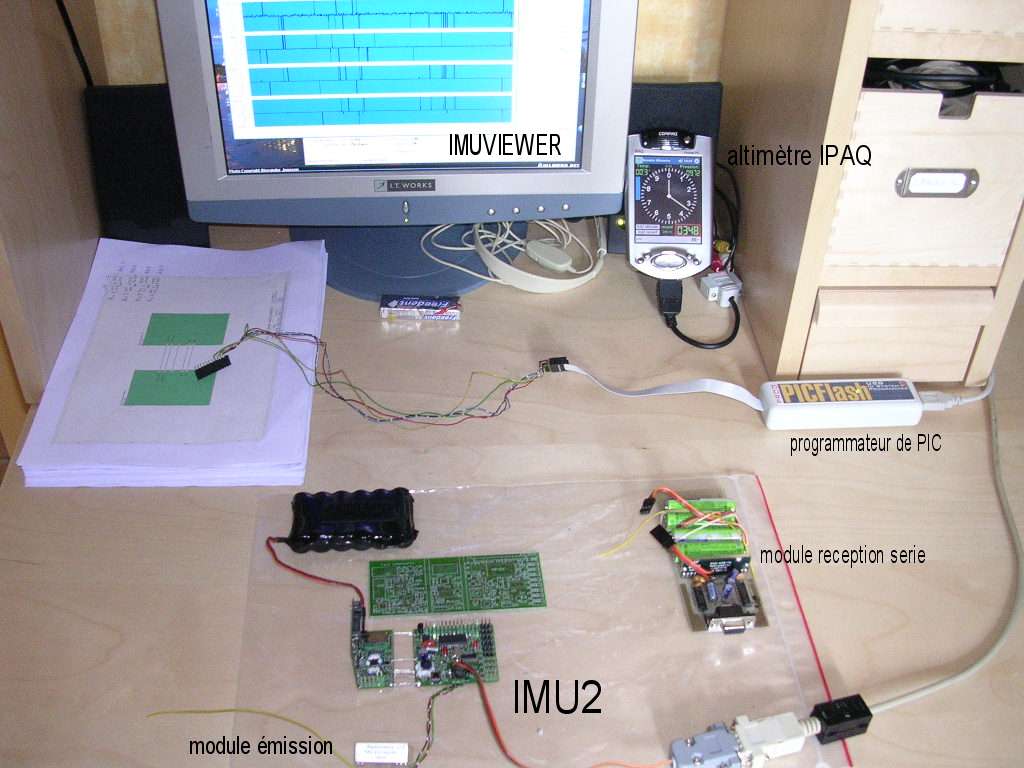
Des essais ont été réalisés sur la centrale version 2 en statique, un capteur SRF10 de distance à ultrason a été ajouté sur le bus I2C ainsi qu' un compas 3D à base de composants HMC1021 et HMC1022. Le compas 3D fonctionne à priori très bien, même avec une inclinaison importante. Par contre le SFR10 pose beaucoup de problème ( mesures non fiables). Un nouveau record d'altitude a été ateint avec la centrale à inertie : 739 mêtres ! Vous trouverez ici des mesures faite en vol avec la centrale. Avec l'aide de Jean Pierre Dumont que j'ai connu sur le net et qui fait parti du groupe autopilot, nous avons commencé à regarder de près les filtres de Kalman ( enfin surtout lui !) et nous avons decidé d'acheter une carte GUMSTIX pour faire tout les processing de la centrale (Kalman) ainsi que la navigation par elle même. Cette carte dispose d'un processeur à 400Mhz, 64 Moctet de mémoire d'entrées / sorties, liaison I2C, 3 ports séries et une liaison bluetooth. Bref un petit bijou. La GUMSTIX devrait arriver fin février, en attendant nous préparons les outils nécéssaires à l'intégration du logiciel sur cette carte ( linux Debian, toolchain pour la Gumstix, cygwin). De plus un EFIS "portable" sur IPAQ a commencé à voir le jour. Ceci permettra de vérifier à distance si l'IMU fonctionne comme prévu.
{kind=link}
- Mars 2005
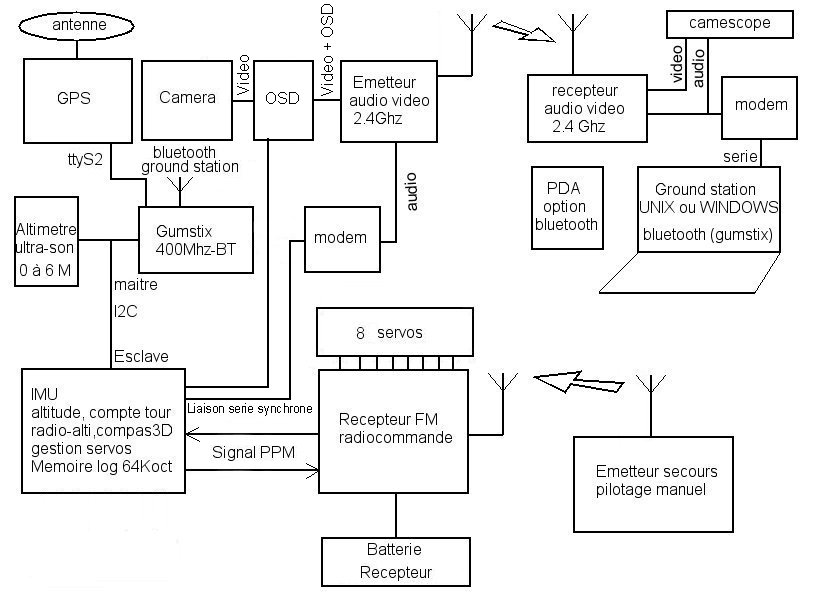
recu carte émetteur récepteur 2.4 Ghz ainsi qu'une caméra miniature de type CCD de chez blackwidow. le but étant d'utiliser le canal son pour transmettre les données au sol ( merci de l'idée Antoine). Les premiers éssais vidéo ont été fait à bord d'un planeur et c'est assez concluant comme vous pouvez le voir sur cette vidéo. La carte gumstix a été "prise en main". Il faut la maitriser la petite bête ! Surtout qu'étant un newbie dans le monde linux ce n'est pas facile. L'organigramme général de ce projet devient donc un peu plus précis comme vous pouvez le voir sur ce schéma.
{kind=link}
- Avril / Mai 2005
Un premier filtre de Kalman a été implémenté dans la Gumstix pour voir ce que cela donnait en vol. Pour cela la Gumstix et la centrale ont été accrochées ensemble sur le Terex de JP. Visisblement, en stationnaire, le filtre a pas l'air de décrocher. Par manque de place il n'a pas été possible de faire des translations mais nous prévoyons cela rapidement. J'ai moi même commandé un Trex 450 pour faire les essais. En même temps des essais de centrale à bord d'un piper avec gumstix et caméra vidéo vont être éffectués, les données seront envoyées et enregistré sur un caméscope afin de rejouer le vol tranquillement à la maison, il suffit que je recoive les quartzs du modem commandé aux USA. Les modems réalisés sont a base de CMX469.
{kind=link}
{kind=link}
- Juin / Septembre 2005
Période calme à cause des vacances. La Gumstix est pour moi un outil puissant mais lourd à gérer. N'étant du monde linux j'ai beaucoup de difficultées à la maitriser !. En même temp j'ai découvert la carte ROVIN chez lextronic. C'est une carte basée sur un processeur ARM7TDMI avec un noyau temp réel et multitache qui tourne à 83 Mhz. Elle est livrée avec une interface IDE en language C. Les premiers éssais de cette carte ont été éffectués : l'interface du language C ne supporte pas toutes les fonctions de base comme printf par exemple ou les tableaux multi-dimensionnelles ( variable [x][y] ). Par contre niveau entrées / sorties elle est bien servie : interfaces séries, bus I2C, bus SPI..... Le premier logiciel que j'ai réalisé est l'interface I2C avec la centrale à inertie, pour voir. Avec toutes les interfaces I2C j'arrive à lire ces informations 50 fois par secondes, moins que le PIC mais très facile à gerer ( en un soir alors qu'avec la gumstix ca fait 6 mois que je cherche......). La prochaine étape étant de faire un autre process pour faire tourner un filtre de kalman. Par contre les modems à base de CMX469 marchent visiblement bien et seront toujours utiles pour les éssais. La prise en main du TREX dans le jardin est aussi en progrès !. Il faut dire que programmer le supertef de Mr Thobois pour un hélico n'est pas chose facile. En plus je suis entraint de terminer le datalogger / vario pour le club.
- Octobre / Novembre 2005
Après avoir passé pas mal de temps sur la carte ROVIN, il apparait que cette carte est un peu lente pour le filtre de Kalman ( une boucle en 300mS au lieu de 30mS avec le PIC. Du coup j'ai échangé la carte avec une AIM711 ( processeur ARM). Celle ci tourne rapidement ( filtre de Kalman comme sur le PIC de 30mS ) mais le bus i2c est très sensible, la simple connection d'un oscilloscope plante la carte. A priori c'est pour cette raison que les concepteurs de cette carte ne parle pas du bus i2c. De plus le support est inexistant avec cette société. La carte tourne sous on OS temp réel ECOS ( version 1.2). Dommage ! cette carte était prométeuse. Du coup retour sur la Gumstix car j'ai découvert sur le net comment configurer le port i2c. Maintenant j'arrive à discuter avec tous les périphérique i2c ( la centrale à inertie et le capteur de distance ultrasonique). J'ai fait l'aquisition dun module GPS de chez Ublox, LEA-4P, le dernier sorti de cette société. Le soft d'interfacage entre le GPS et la gumstix tourne également. Bref, à aujourd'hui tout les périphériques sont accéssibles depuis la Gumstix. Cela permet maintenant de ce concentrer sur le soft lui même de stabilisation et de navigation.
- Décembre 2005
Début d'éssais en vol pour le TREX avec la carte Gumstix et la centrale à bord pour tester un nouveau filtre de kalman.
Pour cet éssai, l'hélico était dans le jardin en liaison Bluetooth sur le PC. Le filtre amorti pas mal les vibrations recues du moteur comme on peux le voir sur cette capture. Le GPS a été connecté à la Gumstix. L'activation du mode SBAS sur le GPS améliore pas mal la précision et est souvent disponible ( de l'ordre de 5 mêtres). Un accès à bord de l'hélicoptère à travers une page internet est maintenant possible ( accès temps réel sur une page web).
- Janvier 2006- Avril 2006
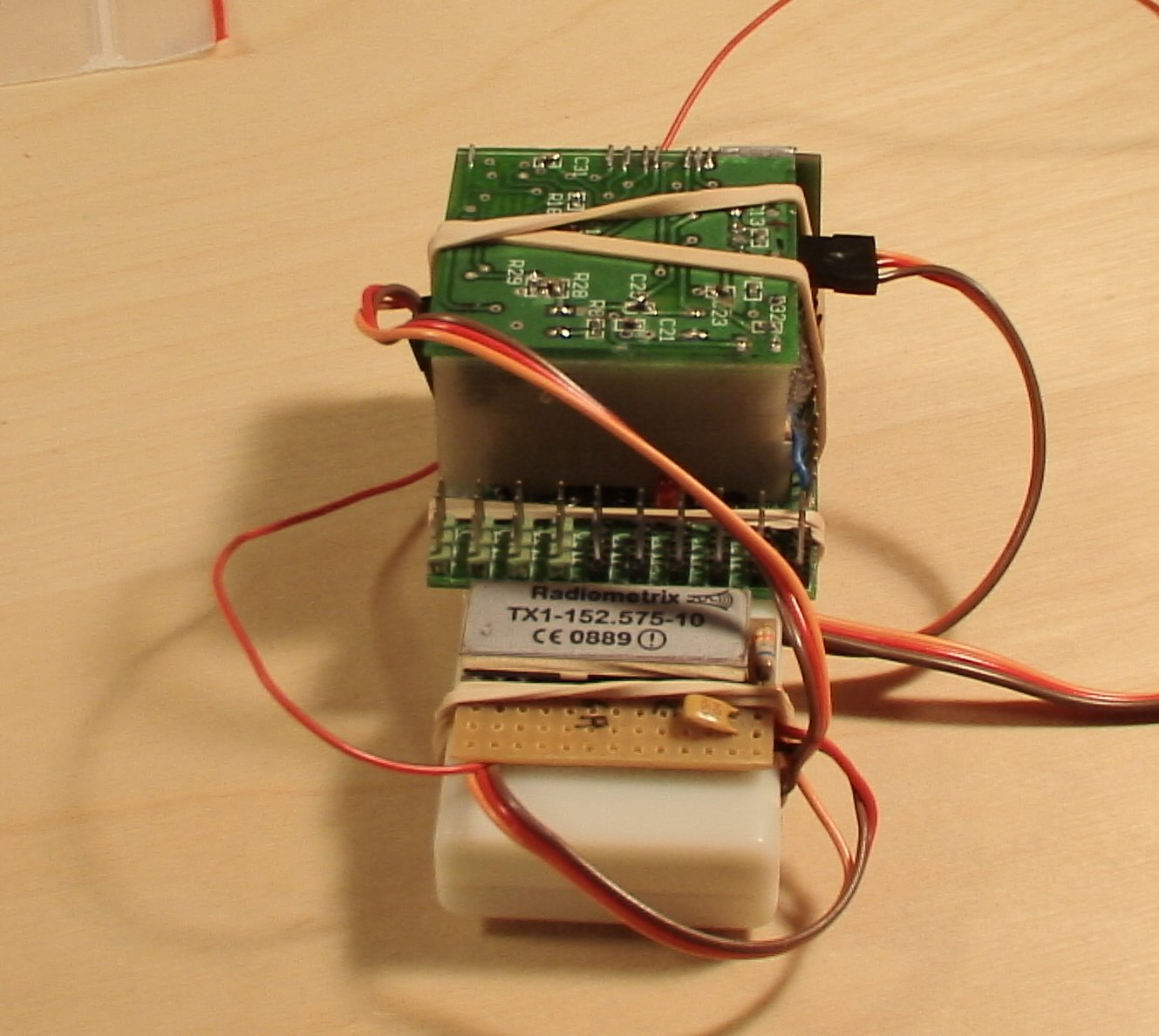
Juste une petite mise à jour pour dire qu'après avoir fait des éssais dans le jardin de la centrale IMU version 2, j'ai réalisé un autopilot complet en un seul module. J'avais trop de cables dans l'helico qui trainaient un peu partout donc j'ai décidé de tout intégrer: récepteur GPS, tachymêtre rotor, décodage et encodage pour les servos, gumstix intégré dans le module, gestion alim moins contraignante de 3.2 Volts à 11 volts, le capteur de préssion et de température, une EEPROM externe de 64K, sortie vers module ultrasonique, les 3 gyros, les 3 ( 4 en fait) accélérateurs, le compas magnétique 3D. Le tout dans un module de 87mm x 37mm x 20mm. photos ci-dessous.
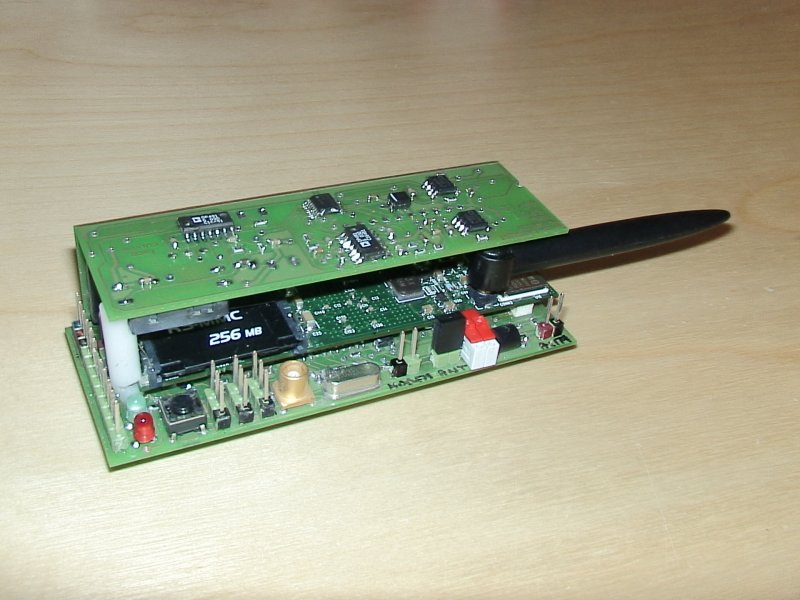


Il a fallu re-ajuster le logiciel mais une première version pour faire des tests tourne. Dans le même temps j'ai decouvert GEtrax, un logiciel qui converti des fichiers NMEA en KML supporté par google earth. Génial ! je peux visualiser mes vols. Voici trois exemple si vous avez google earth vol1 vol2 et vol3. Ces vols ont été réalisés avec le piper. Pour les visualiser il faut les sauvegarder sur votre disque puis un double clic dessus lancera automatiquement Google Earth. Je ne sais pas pourquoi mais ces fichiers sont sauvegardés en *.xml au lieu de *.kml, il faut simplement les renommer !
- Mai 2006- Juin 2006
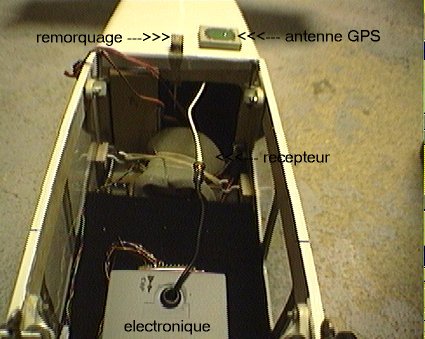
Ca avance, ca avance !! J'ai décidé d'installer toutes les parties d'électonique ensemble pour voir si il n'y avait pas d'interférences. Un petit souci : l'antenne GPS trop raprochée de la la carte autopilt, le bluetooth empêche la réception GPS ( de toute facon en vol il faudra inhiber le Bluetooth, mais par souci de sécurité il a fallu éloigner l'antenne GPS. J'avais une Twinjet qui trainait dans le garage avec accus NiCad, le tout pesant 1.6Kg quand même. j'ai décidé de tous installer dans cette twinjet en remplacant les accus NiCad par un lipo. résultat: 1.1Kg avec caméra, et la carte autopilot et un petit accu NiCad pour alimenter l'autopilot et la caméra. Photos cidessous:



Des éssais en immersion sont prévus dès que la météo le permet !
-
Juin 2006 - Juillet 2006
Les premiers éssais en immersion on été réalisés ! le pilote, Ludo arrive a piloter l'engin en moyenne 3 minutes. J'ai installé l'autopilot dans un Easy glider et cela et deja plus facile à piloter en immersion que la twinjet. Pour faciliter le pilotage j'ai ajouté un module OSD ( incrustateur de texte dans la video). voir ci dessous:

Ceci permet de voir quel cap est à suivre pour rejoindre la base ou le prochain waypoint, l'altitude, la vitesse et l'état du GPS.
-
Aout 2006 - Septembre 2006
Changement d'affichage (OSD) à la demande du pilote ! plus d'informations disponible et le tout regroupé dans le haut de l'écran pour garder une image "propre". Un éssai en vol a été éffectué début septembre. Le pilotage en immersion a l'air plus facile avec le nouvel affichage d'après Ludo. Mise en évidence d'un problème d'algorhytme pour le calcul sur les accélérometres : en virage les angles reste a zero alors que les accéléromètres varient bien ( du à la force centrifuge en virage) donc il faut revoir ces calculs ( sans les filtres de Kalman dans un premier temps ). La vidéo du vol ce trouve ici.

-
Octobre 2006
Petite sortie dans le pas de calais pour faire du vol de pente. Ne voulant pas rater l'occasion de filmer autre chose que les marmousets, j'ai donc fait un petit film avec l'easyglider qui se trouve ici.
Premier vol en immersion totale avec le Easyglider, incluant l'attérissage ( sans la permission de la tour de controle Grrrrr...). Le module OSD facilite le pilotage pour suivre des waypoints. Des lunettes LCD 3D ont été commandées pour éviter que le pilote soit toujours la tête dans un carton. Du coup, évidemment, le pilote aimerait que lorsque il tourne la tête la caméra fasse la même chose !. Donc début de construction d'un module pour suivre les mouvements de la tête avec 2gyros et un PIC ! ( ca finira jamais ! LOL. La page web de ce montage se trouve sur ce lien). Le filtre de Kalman me prenant la tête, je vais monter un module infra-rouge pour la stabilisation en attendant que le filtre marche. Cela pour pouvoir faire des éssais de pilotage automatique rapidement.

-
Novembre 2006/Janvier 2007
Dans la série les nerfs, les lunettes LCD commandées aux USA : elles ne sont jamais arrivées et j'ai fini par comprendre que je me suis fait avoir de 450 USD. Faite attention à ce vendeur "Auto toyz and electronics" basé a SAN ANTONIO. C'est un voleur!
-
Fevrier 2007 / MARS 2007
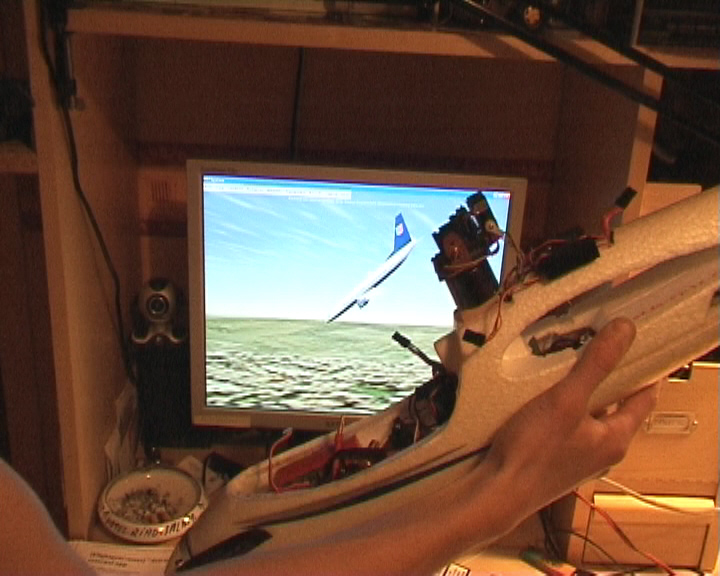
Gros progress, à priori dans l'avancement du drone : j'ai trouvé sur le net un filtre de Kalman qu'il a fallu bien évidemment adapté, mais je suis confiant dans les éssais en vol que je vais faire ce week-end si le temp le permet. Pour tester ce filtre en statique j'ai implémenté dans le logiciel du drone une liaison UDP par Bluetooth avec FlightGear, le simulateur de vol gratuit. La qualité de la vidéo n'est pas au top mais vous pouvez voir le résultat ici ( fichier de 5 méga). Le 737 de FlightGear suis les mouvements de mon drone. Ce filtre en tout cas ne plante pas ce qui est un gage de sécurité pour le reste du drone ( communication avec la radiocommande toujours possible). Ce filtre a l'air beaucoup plus fluide que celui d'autopilot, reste à voir tous cela en vol ! De plus toutes les vérifications pour donner la main à l'electronique ont été vérifiées ( les commandes de la radiocommande sont recues par le récepteur et passe maintenant par l'ordinateur de bord puis les renvoies dans le récepteur pour actionner les servos, il faut donc être sur du coup !). Avec la mauvaise expérience des lunettes LCD commandées aux USA, j'ai recommandé les mêmes lunettes mais à l'autre bout de la planète.... en chine. J'espere les recevoir "rapidement" ! En parallèle de ceci, nous étudions également au club de fabriquer un nouveau porteur pour avoir plus de place dans le fuselage. Sur la photo ci-dessous la caméra se retrouve au dessus du capteur d'horizon ( qui servira plus a rien si le Kalman fonctionne), ce qui commence a faire beaucoup !
- Mars 2007 / Avril 2007
Enfin recu les lunettes 3D de chine et donc le 1er vol en immersion réalisé sans casse. Impréssionnant on s'y croirait. Le seul défaut est que parfois, lorsque la vidéo est de mauvaise qualité les lunettes décrochent pendant une seconde. A priori toutes les lunettes LCD font cela. Du coup je pense mettre l'OSD au sol pour regenerer le signal vidéo au cas ou la vidéo recue est de mauvaise qualitée. De plus le drone sera plus léger, la consomation plus faible, la possibilitée au sol d'enlever l'incrustation dans la vidéo et le module de la caméra qui suit les mouovements de la tête plus petit, car ce module OSD, aujourd'hui est dessus.
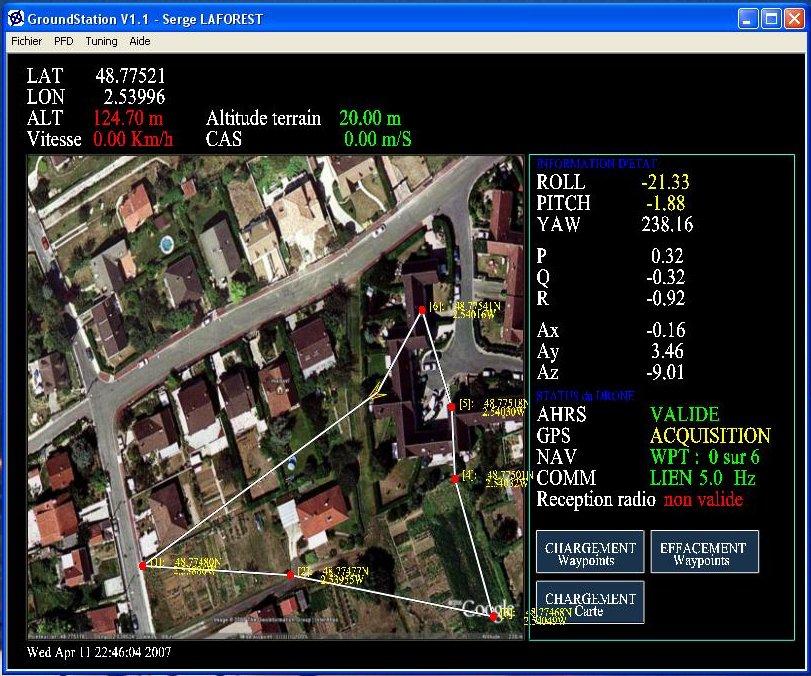
Mais le top reste les lunettes connectées au PC et a jouer à une course de 3D en voiture ; au bout de dix minutes ilfaut retirer les lunettes et le casque car on devient vite fou. Je comprends maintenant pourquoi ce produit est pas trop diffusé, car entre les mains des gamins ca serait tres dangereux à utiliser pendant des heures. Le kalman a été testé à l'occasion de ce premier vol en immersion et c'est déja bien mieux qu'avant. Au moins ca plante plus mais il y a encore des abérations d'angles. J'ai une petite idée pour corriger ca et dès que je peux je teste ca en vol, je suis assez confiant. D'un autre coté j'ai adapté un soft trouvé sur le net pour une groundstation : cela permet de voir l'aéronef sur une carte et de programmer par bluetooth les waypoint avant le décollage. En plus evidemment, et apres le décollage, ca affiche les parametres de vol par l'intermédiare de la transmission au sol par le canal audio de la caméra ( et donc le port serie).
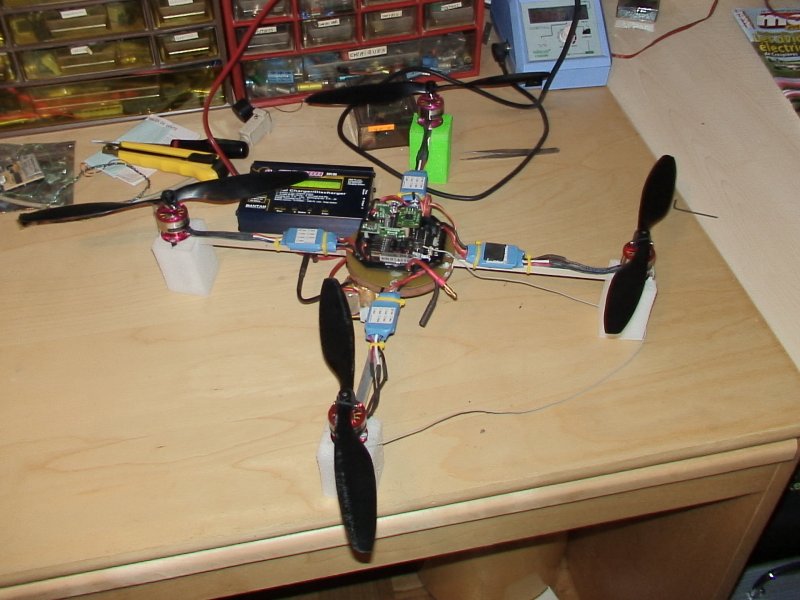
Dans le même temp je commence un quadrirotor, pour le fun, et pour faire des éssais dans le jardin.
- 22 Avril 2007
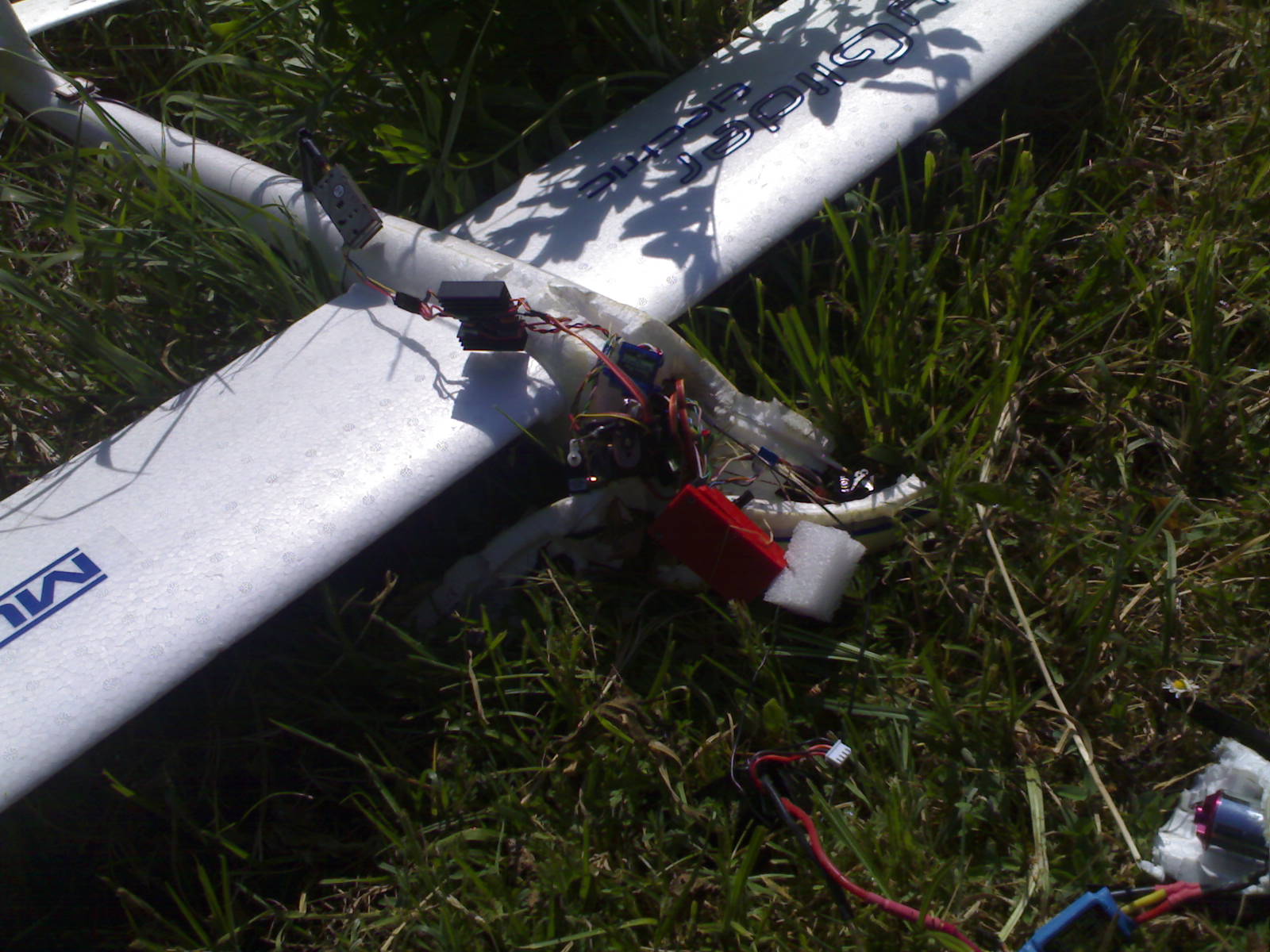
Gros crash du Easyglider ! Après un vol pour tester la liaison récepteur et autopilote qui c'est très bien passée nous avons décidé de faire un vol en immersion pour tester en réel le HMT. La caméra étant légerement orientée vers le bas volontairement pour voir plus souvent le sol, Ludo a pas réussi à prendre ces repères croyant qu'il était toujours cabreur et ca a fini par taper très fort le sol. J'ai pas eu le temp de reprendre la radio !. Résultat tout est détruit ; la Gumstix pliée en deux , perdu un Gyro, le module GPS arraché, le récepteur éclaté, les accus enfoncés, la caméra éjectée mais qui marche encore, les servos plus de pignons et évidemment le Easyglider détruit jusqu'au ailes ! Enfin bref un gros crash quoi ! voir les photos ci-dessous:

-
Mai a Juillet 2007
Après avoir reconstruit un Easyglider et toute l'électronique, j'ai également progressé dans différentes mises au point du système, entre autre un transfert au sol des données en binaire avec checksum. L'OSD a été également déplacé pour ce retrouver sur la station sol. Cela permet beaucoup plus de possibilitées ; moins de consommation à bord, ressources PIC augmentées à bord, ensemble en vol plus léger, et surtout d'éviter un écran bleu dans les lunettes ( qui sont en partie a l'origine du crash). En effet l'OSD au sol continura d'envoyer une synchro vidéo même sans source vidéo, ce qui permet aux lunettes de ne pas chercher pendant une seconde la synchro et donc quand la vidéo reviendra d'afficher celle-ci desuite. D'autres avantages à faire ceci et que je pourrais suivre en temps réel sur google earth la position de l'aéronef et une fonction "bypass" toujours possible qui permet de n'avoir que la vidéo embarquée, sans texte. Tous cela sur le papier car pas encore testé en vol ( l'angoisse de recracher ! lol).
De plus j'ai l'immense chance de pouvoir tester une centrale à inertie de type MIDG II. J'ai donc intégré cette INS dans mon système pour tester ca en vol. l'ensemble est pratiquement pret, il ne me manque que la météo et le temp de faire un vol d'éssai.
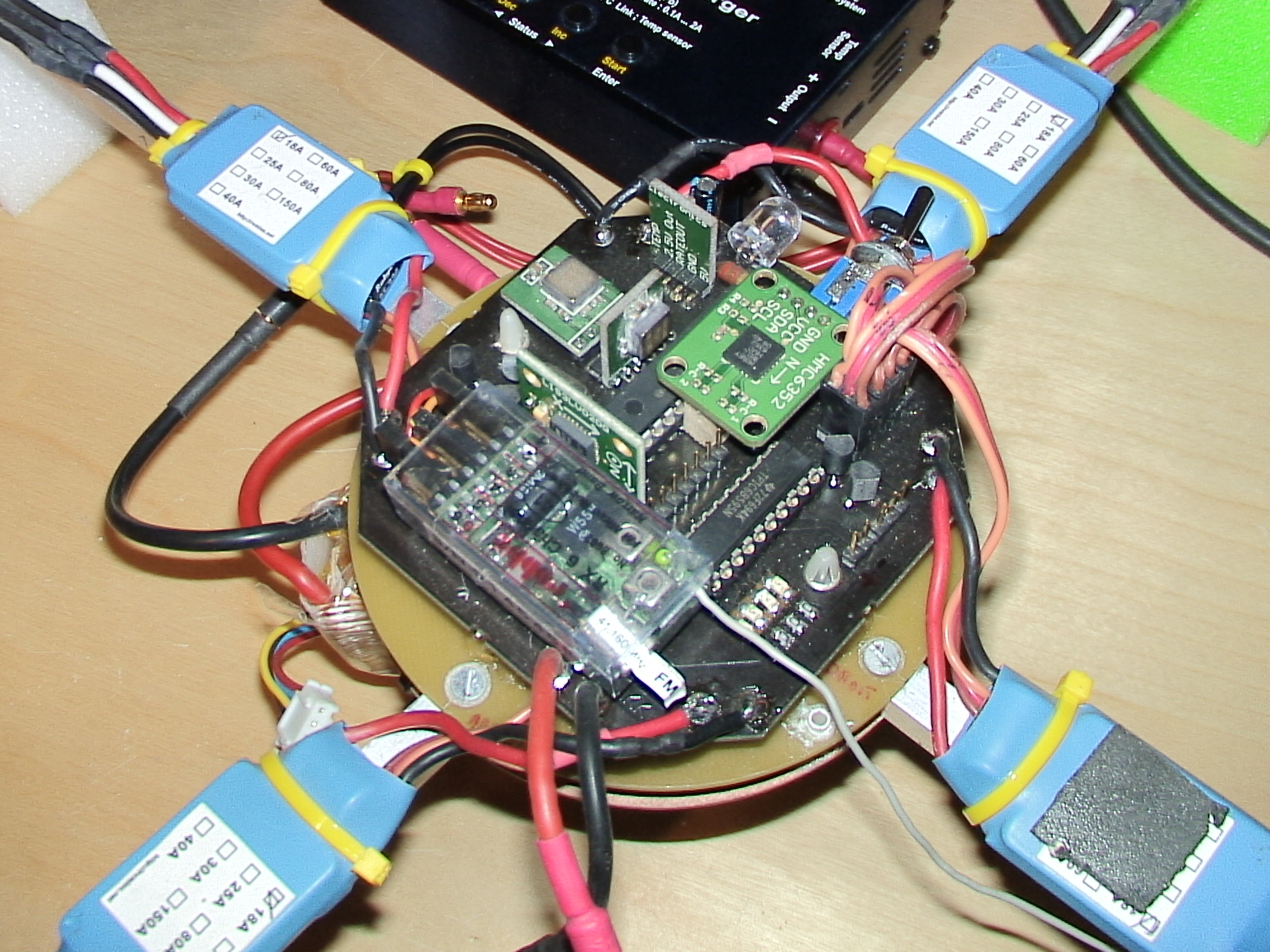
Dans le même temps je me suis construit un quadrirotor en open source http://uavp.de//. J'ai installé toutes les options ( 3 gyros ADRRS300, accélerateurs 3D et compas 2D). C'est un quadrirotor brushless avec 4 moteurs CF2822. Il a l'air (trop) puissant mais je n'ai pas eu le temp de régler tous les paramètres. Des que je le peux je le regle. En fait il y a 28 paramètres à regler et, même si le logiciel est très convivial, ce n'est pas évident à regler.
-
Aout et septembre 2007
Les éssais de la MIDG II en vol sont très concluant ! J'obtiens bien les angles de euler réels. La vidéo avec l'OSD à bord du drone est de meilleur qualité et l'on peux éffectivement voir que les angles calculés par la centrale sont bien la réalité.
Dans le même temps, le quadrirotor ne vole toujours pas ! les 26 paramètres à régler sont pas facile. Pour l'instant il a volé à 2 m d'altitude et 2 secondes, pas plus. A priori les soft de base a du mal à gérer les quadrirotor légers. Je suspect égallement les controleurs de brushless. J'en ai commandé d'autres !
-
Octobre et Novembre 2007
Il y avait longtemp que j'avais pas fait une petite mise à jour de cette page, non pas parceque j'avance pas, mais au contraire car je suis débordé avec ce projet !.
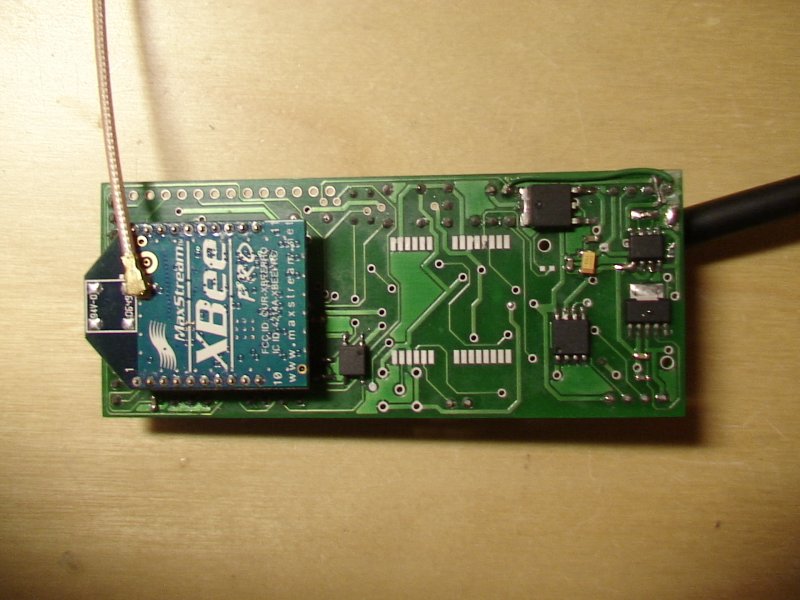
Tout d'abord les logiciels au sols groundstation et interface avec FlightGear ont été débuggé. Des tests ont même été fait pour voir l'état du drone et modifier les waypoints a 600 Km de distance par internet! Je commence une nouvelle version d'autopilote mais sans les gyros/accélérateurs/ compass car pour l'instant la MIDG II donne toute satisfaction. Une liaison bidirectionnelle avec le sol va être implémentée ( module XbeePRO) afin de changer les PIDs et les waypoints en vol. une isolation galvanique entre l'autopilote et le récepteur a été également intégré dans celui-ci. Le modem pour transmettre les données au sol est intégre maintenant dans un module séparé qui gère également l'OSD ( ceci permet de considérer la vidéo comme une option ou pas, tout en allégeant l'autopilote si on ne veux pas de caméra).
Coté quadrirotor UAVP, je vais faire une page séparée pour mettre toutes les informations qui pourrait servir a des gens qui veulent se lancer dans ce projet. La page va se trouver ici. Celui-ci commence a voler pas trop mal après beaucoup d'essais de paramètres.
-
Décembre 2007 à Mars 2008
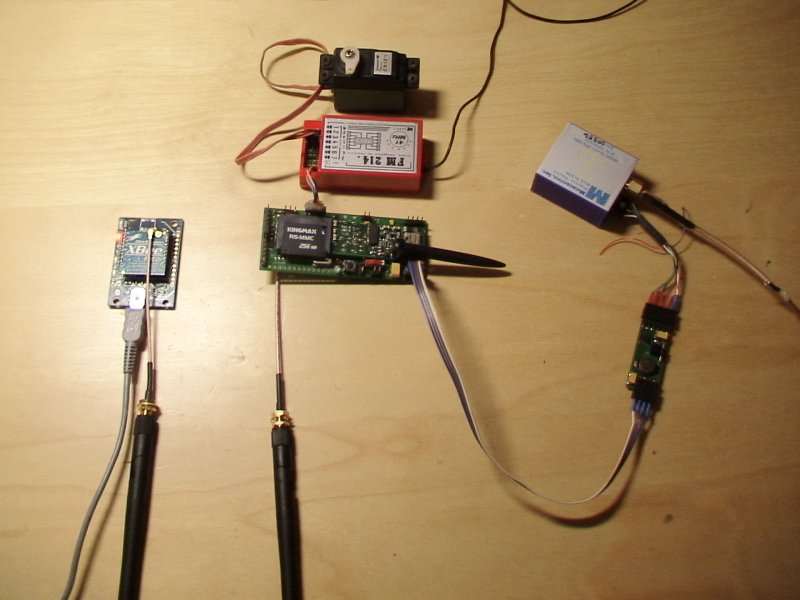
La nouvelle carte d'autopilote a été cabée et testée. Celle ci inclue maintenant un module Xbee qui permet de dialoguer dans les deux sens avec le drone. Cela va permettre d'envoyer des ordres ou des paramètres au drone à "longue" distance, entre autre pour tester les PID. Les commandes à envoyer du sol sont, ou vont êtres intégrées dans la groundstation pour avoir une interface convivial. Avec le Xbee il est également possible d'envoyer des entrées/sorties au drone. Cela pourra servir pour reset l'autopilote entre autre en cas de gros probleme (j'ai toujours la possibilité de piloter le drone avec la télécommande, même si la gumstix reboot ). J'ai fabriqué également un OSD+ MODEM sur circuit imprimé et une interface MIDGG II, l'isolation galvanique du récepteur est maintenant intégré dans l'autopilote et deux entrées analogique sont disponibles au cas ou. Tout ceci fait plus propre et est plus fiable. Coté logiciel il reste "plus" que le PID à implémenter dans le drone. La groundstation a été également revu avec plus de possibilités : connection en USB pour avoir un lien direct avec la liaison Xbee ou connection par TCP/IP pour piloter le drone à travers internet! Et ca marche, des éssais ont été fait et l'on peux parametrer et voir l'état des variables par internet. On peux même programmer toute la mission par internet et lui donner l'ordre de décoller...... Il suffit qu'un autre PC soit connecté sur internet et que ce PC recoive les infos Xbee du drone ( le soft est fait également). Sauf que pour l'instant le PID n'étant pas implémenté il va vite tomber !
Ci-dessous les premières photos du nouveau système complet.

-
Avril 2008 et Mai 2008
Les PIDs sont maintenant implémentés dans l'autopilote. Il y a 5 configurations possible de pilotage: uniquement maintient axe roll, uniquement maintient axe pitch, uniquement maintient vitesse, maintient d'un cap, maintient d'une altitude. De plus il y a un mode full automatique qui permet de rejoindre les waypoints en séquences celon le plan de vol réalisé par la groundstation. Tous ces PID sont paramétrables par la station sol en temp réel ce qui permetra de faire la mise au point rapidement. L'autopilote a été remonté dans l'Easyglider pour les tests du sens des débattement et des amplitudes de débattements. Le basculement automatique / manuel par la radiocommande fonctionne. Un souci apparait : lorsque je suis en mode manuel les ordres données sont très lents sur les servos. Je dois voir cela avant le premier test en réel. une fonction de réglage de mise au neutre a été également implémenté dans le logiciel de la station sol. J'ai également réalisé un logiciel tournant sur le PDA / téléphone pour avoir l'horizon artificiel ( juste pour le fun ! LOL). L'OSD a été mis à jour pour afficher le mode de pilotage. Dans la théorie des choses ( a part le bug de lenteur des servos en mode manuel) je devrais pouvoir faire le premier vol en automatique rapidement; 10 ans après le début du projet !!!!!!
-
Juin 2008
Et encore un crash le 25 mai 2008 lors du premier éssai de pilotage en automatique. En fait le mode de pilotage choisi était de maintenir un virage de 30°, chose que l'autopilote a très bien géré. Le pilote aillant toujours la main sur la profondeur et les gaz. En fait après analyse de la log, j'ai pu constaté que la liaison radio a été interrompu et donc le pilote ne pouvait plus maintenir l'altitude à la profondeur et le moteur, d'ou une spirale engagée. Après avoir presque tous changé sur le récepteur à cause du crash, je me suis appercu qu'une patte du circuit intégré principal était coupée ( à priori pas a cause du crash). Le point positif est que la régulation de l'inclinaison à 30 degré a fonctionné jusqu'au sol ! La dernière télémesure indiquait une vitesse de 91 Km/h à 16 mêtres du sol en plein piqué incliné à 32°!
Donc une fois de plus, plus de Easyglider. J'ai donc décidé de faire un autre quadrirotor avec mon éléctronique. Ceci permettra de faire des éssais dans le jardin ou sur une potence. Le nouveau quadri est fait, le logiciel du PID adapté pour un quadri et la potence est faite également. Le premier éssai sur potence a été éffectué hier soir dans le bureau ce qui m'a couté le petit doigt dans une des hélices ! faut être stupide pour penser, par reflexe, que l'on peut maintenir la quadrirotor !
-
Juillet/ Aout 2008
En fait il y a plus de travail que je pensais sur le PID pour un quadri. A aujourd'hui un PID "de base" tourne mais je ne suis pas satisfait du temp de réaction de celui-ci. Lorsque je lui impose un angle de pitch de 10°, par exemple, le quadri oscille entre 5° et 15°. Je ne sais pas quoi penser : si c'est les valeurs de PID qui sont pas bonnes ou si c'est l'IMU qui envoie des données "que" à 50 Hz pour les angles. Je vais fixer l'UAVP sur la potence pour savoir si il y a le même problème en statique. Le GPS pose aussi quelques problèmes depuis que j'ai racourci le cable d'antenne. Visiblement maintenant je sature l'étage d'entrée du récepteur GPS de la centrale MIDG II. Sur l'Easyglider j'avais déja remarqué que lorsque je racourci ce cable, le temp d'acquisition augmentait. Avec 10 cm de cable il acroche jamais les satélittes. C'est quand même "idiot" de metre 1 mètre de cable alors que 10 cm suffirait........
Mail : serge.laforest