HEAD MOUNT TRACKER
En franÁais : ę camťra orientable
suivant les mouvements de la tÍte Ľ

Crťation le
3 Novembre 2006
DerniŤre
mise ŗ jour le 24 Novembre 20007
En progressant dans le
projet du drone, le
pilote Ludo, qui en demande toujours plus, souhaitait avoir la possibilitť de
faire bouger la camťra ŗ bord du modŤle rťduit sur 2 axes (haut/bas et droite
gauche). Nous avions vu des vidťos sur le net avec ce genre d’interface
et cela ŗ l’air plus simple ŗ piloter en immersion.
Pour cela il est
nťcessaire de capter les mouvements de la tÍte avec 2 gyroscopes (il
n’est pas possible d’utiliser un accťlťrateur sur l’axe
droite / gauche, ou difficilement). En parcourant le net je suis tombť sur un
nouveau chipset l’IDG300
de chez InvenSense. Ce circuit inclus 2 gyroscopes.
De plus il existe un module tout prÍt le ę break out module Ľ, ce
qui facilite la construction. Lextronic
ayant en stock ce module j’ai dťcidť de partir dans l’aventure.
Le module doit Ítre
petit, autoalimentť par l’ťmetteur si possible, avec une possibilitť de
recentrer la camťra en cas de dťrive des gyroscopes. Le principe est simple, il
faut extraire et analyser la trame PPM de l’ťmetteur et modifier les voies 6 et 7 afin
quelles reflŤtent la position de la caméra, les autres voies ne devant pas Ítre
changťes car utilisťes pour piloter l’aťronef. Sur la plupart des
ťmetteurs du commerce une prise d’ťcolage est disponible et donc va Ítre
utilisťe pour faire ce changement dans la trame PPM. Une fois la trame PPM modifiée, elle est ré injectée dans l'émetteur toujours par la prise d'écolage. Une inversion de sens de
dťbattement des servos est ťgalement prťvue pour faire face ŗ toute
possibilitť. Il est ťgalement possible de connecter les servos en direct sur ce
module pour d’autres applications ťventuelles (en fait pour le
dťveloppement cela permet de se passer de l’ťmetteur et du rťcepteur). Un
PIC 18LF252 trainant sur le bureau a ťtť rťquisitionnť pour faire ce module.
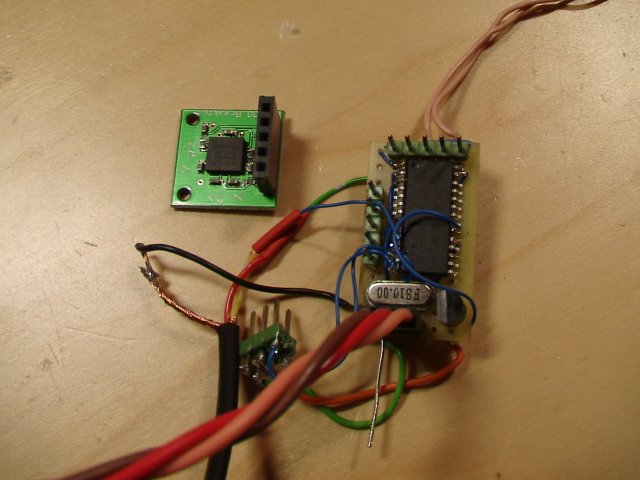
Détails de la carte prototype avec le module IDG-300 sur le coté:
Ci dessous le même module mais finalisé
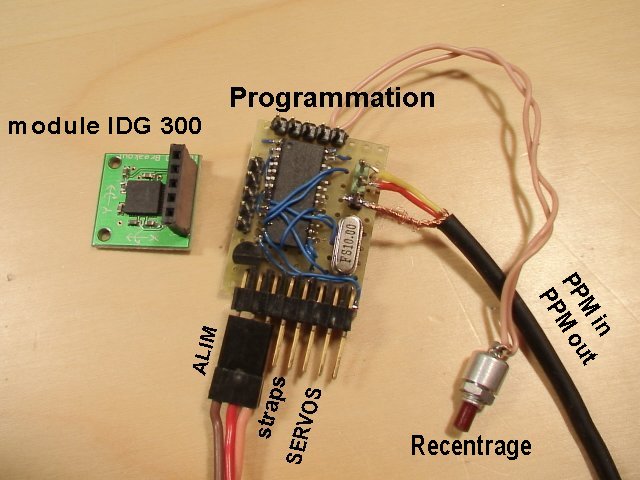
Fonctionnement dťtaillť :
Le PIC lit les valeurs
analogiques des gyroscopes sur ces entrťes AN0 AN1 (configurť avec une
rťfťrence de 0V ŗ VCC du PIC). D’autre part le PIC analyse le signal PPM
venant de l’ťmetteur aprŤs mise en forme par un transistor sur son entrée RC1. Le PIC
regťnŤre le signal PPM sur la patte RC0 en modifiant les voies 6 et 7 sans toucher aux autres
voies. 2 straps sont prťvus pour faire une inversion de sens des servos sur les pattes RC4 pour le pitch ( haut/bas) et RC5 pour le yaw ( droite/gauche). Le PIC gťnŤre ťgalement 2 sorties directement connectable sur
des servos pour des applications ę locales Ľ au cas oý. la patte RC2 génere le signal pour le servo yaw ( droite/gauche) et la patte RC3 génera le signal pour le servo du pitch (haut/bas). Un bouton poussoir
est prťvu sur l'entrťeRB6 du PIC pour remettre la camťra en position
neutre. Le montage alimente le module IDG 300 par un LPZ2950CV3.3 pour fournir le 3.3v, le PIC lui pour ca part est directement alimenté sur l'entrée de l'alimentaion : ATTENTION L'alimentation du module doit être de 4.5 volts à 5 volts maximum. En gťnťral les prises ťcolage des ťmetteurs sortent
5 Volts et on peut se prendre directement dessus (Voir plus loin). La mise en
forme et ŗ niveau du signal PPM en entrťe est gťrťe par un classique MMBT2222ALT (ou 2N2222 pour la version non CMS),
la sortie PPM vers l’ťmetteur sort directement de la patte RC0 du PIC ( et donc en 5 volts). Pour information,
j’utilise un ťmetteur SUPERTEF96 de Mr Francis Thobois, et ce module
respecte ťgalement le codage PPCM de celui-ci afin de permettre l’ťvasion
de frťquence si nťcessaire. La durťe de la trame est ťgalement respectťe pour
toujours avoir la voie numťro 8 sur ces ťmetteurs. Par contre sur un ťmetteur
SUPERTEF96 il n’existe pas de prise ťcolage et il a fallu en crťer une
(couper la piste entre la rťsistance R14 de 220Kohm et la patte PA6 du microcontroleur sur le module codeur du Supertef96. Le potentiel PA6 du microcontrôleur sort le signal PPM sur la prise d'écolage et la patte "devenue libre" de R14 devient l'entrée de la modulation PPM avant mise en forme par l’ampli-op A4/b).
Bon, Passons aux choses sťrieuses :
Vos trouverez
ci-dessous schťma de ce petit module ŗ fixer sur le front (bien vertical,
sinon interfťrences entre les sorties droite/gauche et haut/bas)
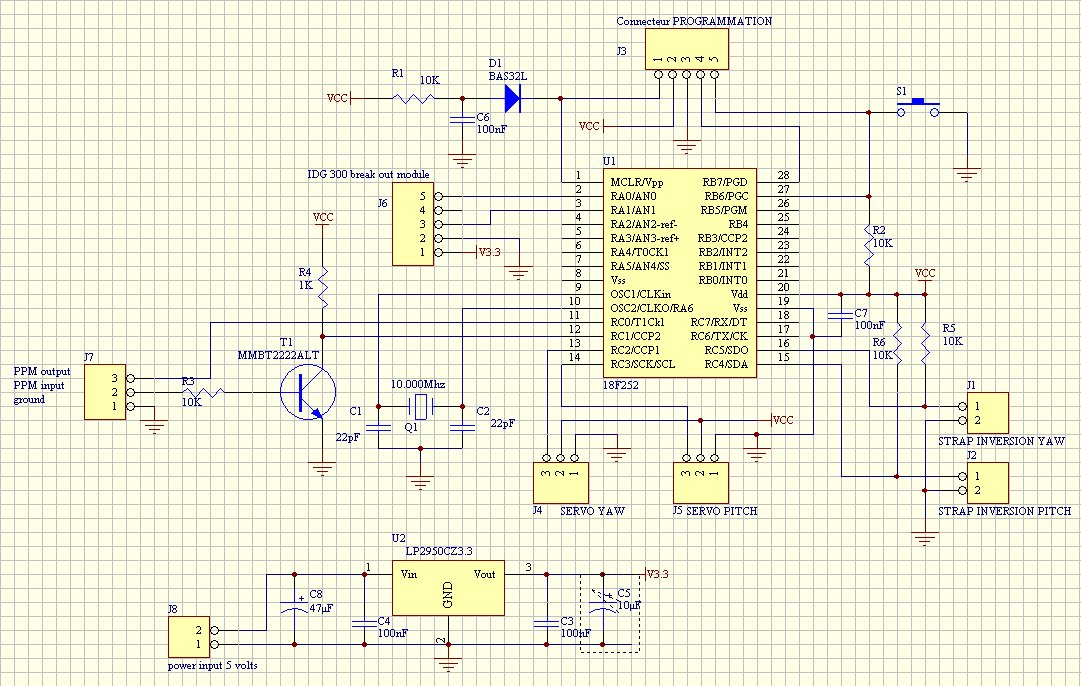
La liste des composants est assez simple :
1 PIC 18LF252††††††††U1†( ou 18F252)
1 LPZ2950CV3.3† ou autre rťgulateur 3.3Volts
1 module break-out
IDG300
4 Condensateurs de 100nF C4, C5, C6, C7
Logiciel ŗ mettre dans
le PIC est disponible ici. pour les voies 6 et 7 ( version du 24 Décembre 2007) (Ne me demandez pas les sources de ce code je ne les
diffuse pas, par contre je suis ouvert ŗ vos propositions de modifications)
Prťcision concernant le logiciel :
Normalement j’ai
prťvu de supporter une modulation dite positive et nťgative mais je n’ai
pu tester que la modulation positive sur mon ťmetteur SUPERTEF96 (le long
silence de +-8mS est ŗ 5 volts et non pas ŗ zťro). Le nombre de voies transmis par
l’ťmetteur doit Ítre de 7 ou 8 voies, mais j’ai testť uniquement 7
voies transmises. Donc il se peut qu’il y ait une ou des erreurs dans
le logiciel mais je n’ai pas d’autres ťmetteurs
pour faire les tests. Si problŤme faite le moi savoir afin de tenter de
corriger cet ťventuel bug.
Interface avec les ťmetteurs du commerce :
Une page expliquant les
diffťrents modŤles d’ťmetteur est trŤs bien faite par Silicium31. Vous trouverez cette page ŗ
cette adresse. Pour ce module nous avons besoin des signaux : masse,
alim +5volts, PPM in et PPM out. Bien vťrifier la tension d’alimentation
fournie par le module ťmetteur. Elle DOIT Ítre de 5 volts maximum sinon il faut
interfacer un rťgulateur genre 78L05. Idem pour la trâme PPM elle doit Ítre de
5 volts au maximum. Si votre prise ťcolage ne dispose pas de l’alim alors
il faudra utiliser une pile ou accu sťparť (cas des prises jack comme les
ťmetteurs Graupner). ATTENTION si vous utilisez un accu sťparé ne pas oublier de
le charger sinon l’ťmetteur ne recevra pas la trâme PPM du module et donc
ne l’enverra pas au modŤle, rappelez vous que TOUTE la trame PPM est
transmise, y compris la position des manches servant ŗ piloter le modŤle !
Laissez un commentaire sur le livre d'or