Le projet de FOU!!!!!!
MISE A JOUR LE 12 avril 2007
Etat d'avancement du projet de drone
en vert : terminé
en orange : proto réalisé, à mettre au propre
en rouge : a faire
|
Carte CPU 80537, Pilote automatique pour maintien de l'avion Carte Gumstix 400Mhz 64 Moctet de RAM, bluetoth, emplacement MMC |
Abandonnée
Carte recue, Kernel recompilé pour i2c et lib C++, logiciels en constante évolution |
|
Hélicoptère TREX 450 ou motoplaneur Easyglider |
En état de vol électronique installée sur Easyglider pour la plupart des tests |
|
Altimètre,Thermomètre |
intégré sur IMU3, terminé |
|
Génération des signaux des servos |
intégré sur IMU3, terminé |
|
Analyses de la position des servos du récepteur |
intégré sur IMU3, terminé |
|
Distance mètre |
SRF10 interfacé I2C sur GUMSTIX,, à tester en vol ( problème écho en intérieur) |
|
Soft télémétrie sur IPAQ |
Commencé (altimètre, vario terminé ) |
|
Centrale à inertie |
IMU version 1 abandonnée, puis IMU2 abandonnée, puis IMU3, Cablée, soft "bas niveau" terminé, connectée en i2c sur GUMSTIX OK |
|
Système GPS |
Connecté en serie sur GUMSTIX OK (ttyS2) |
|
Compte-tour moteur |
integre sur IMU version 3, terminé. Capteur intégré sur l'hélicoptère Concept 30 |
|
Compas digital |
Fait et testé en statique, version 3D sur IMU3. Calibrage a faire |
| station de controle au sol | commencé sur PC en liaison bluetooth ou liaison série, reste à ajouter des fonctions au fur et à mesure |
| Liaison radio, retour au sol télémétrie | utilisation d'un module Radiometrix TX1 et RX1 pour les éssais, a changer pour de plus grande distance. recu émetteur / récepteur vidéo en 2.4Ghz. utilisation du canal son pour la transmission des données grace à un modem in tégré sur IMU3 |
| Head Mount Tracker (suivi des mouvements de la tête de la caméra | fini, testé en statique, a tester en vol |
| OSD (affichage des paramêtres de vol dans la vidéo) | fini, voir pour le mettre au sol pluto que de le mettre dans le drone |
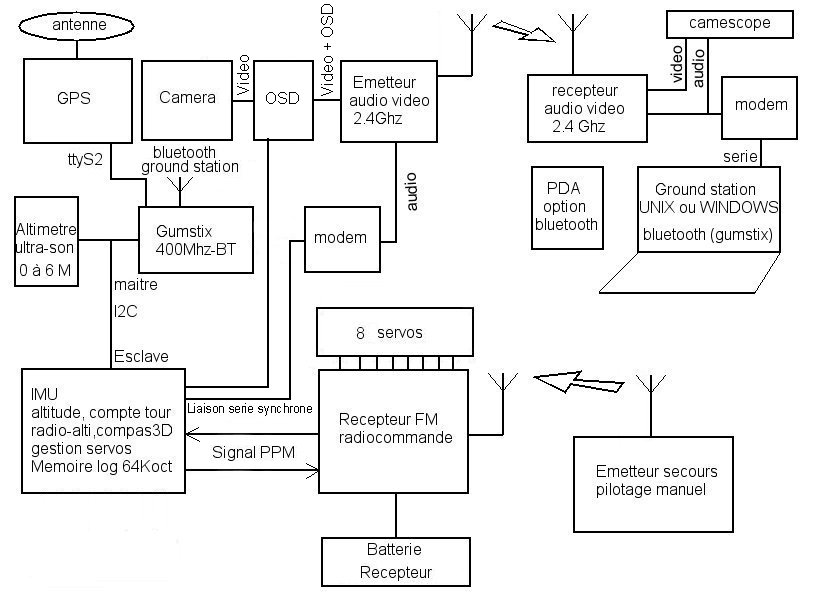
Organigramme général du système.
{kind=link}